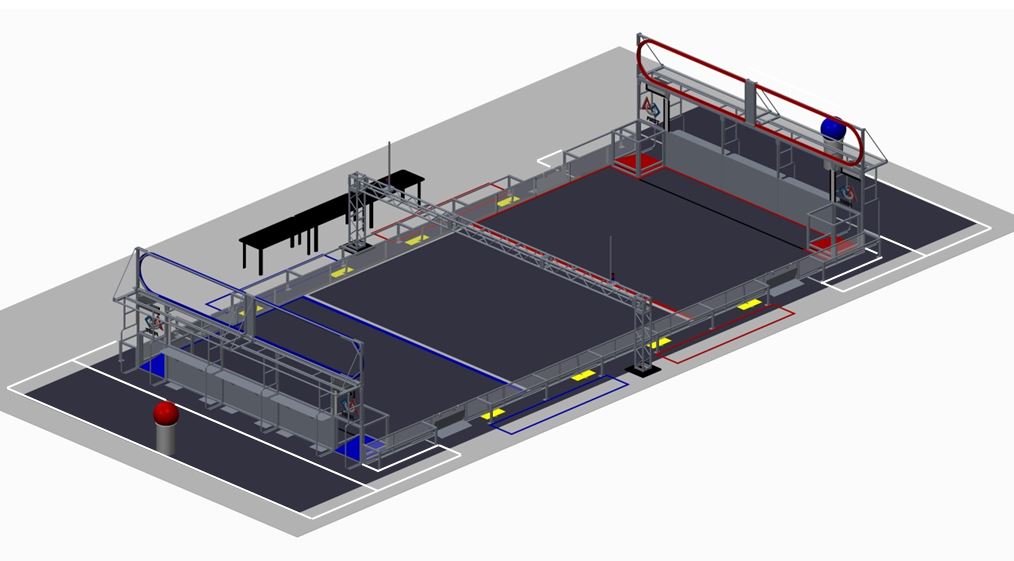
Game Description:
Two alliances of three robots each competed on a flat field straddled by a truss suspended above the floor. In order to win, each robot tried to shoot balls into the high goals, push balls into low goals, and toss balls over the truss before the match is over. With all of the alliance robots working together, the team could receive more points.
Design Solution:
Kirby was fitted with a 4-mecanum drive train to maintian maneuverability while passing balls, picked up by a rotating arm utilizing several rollers. Kirby's shooter was a catapult system made with pneumatics that extended out of the compact frame.

|